Diseñar, construir y operar sistemas AUV/ROV innovadores:
«Implementar arquitecturas modulares y escalables para AUV/ROV, facilitando la adaptación a diversas misiones y la integración de nuevas tecnologías.»

Gestionar proyectos submarinos complejos:
«Planificar detalladamente las fases, recursos y riesgos, asegurando la viabilidad técnica y económica del proyecto.»
Desarrollar e implementar estrategias de mantenimiento predictivo para equipos submarinos:
«Integrar análisis de datos, monitorización remota y pruebas no destructivas para optimizar la disponibilidad y fiabilidad de los activos submarinos.»
Interpretar y analizar datos oceanográficos y geofísicos para la toma de decisiones:
«Evaluar la calidad y fiabilidad de los datos, identificando anomalías y aplicando correcciones apropiadas para modelar escenarios y anticipar riesgos.»
Liderar equipos multidisciplinarios en operaciones submarinas complejas:
«Gestionar la comunicación efectiva y la coordinación entre especialistas (ROV, buzos, ingenieros) para optimizar la ejecución y minimizar riesgos en cada fase de la operación.»
Evaluar riesgos y garantizar la seguridad en intervenciones submarinas:
Implementar un sistema de gestión de riesgos integral, incluyendo análisis HAZID/HAZOP y planes de contingencia robustos, adaptados a las condiciones específicas del entorno submarino y al tipo de intervención, con énfasis en la comunicación efectiva y el control de cambios.

Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

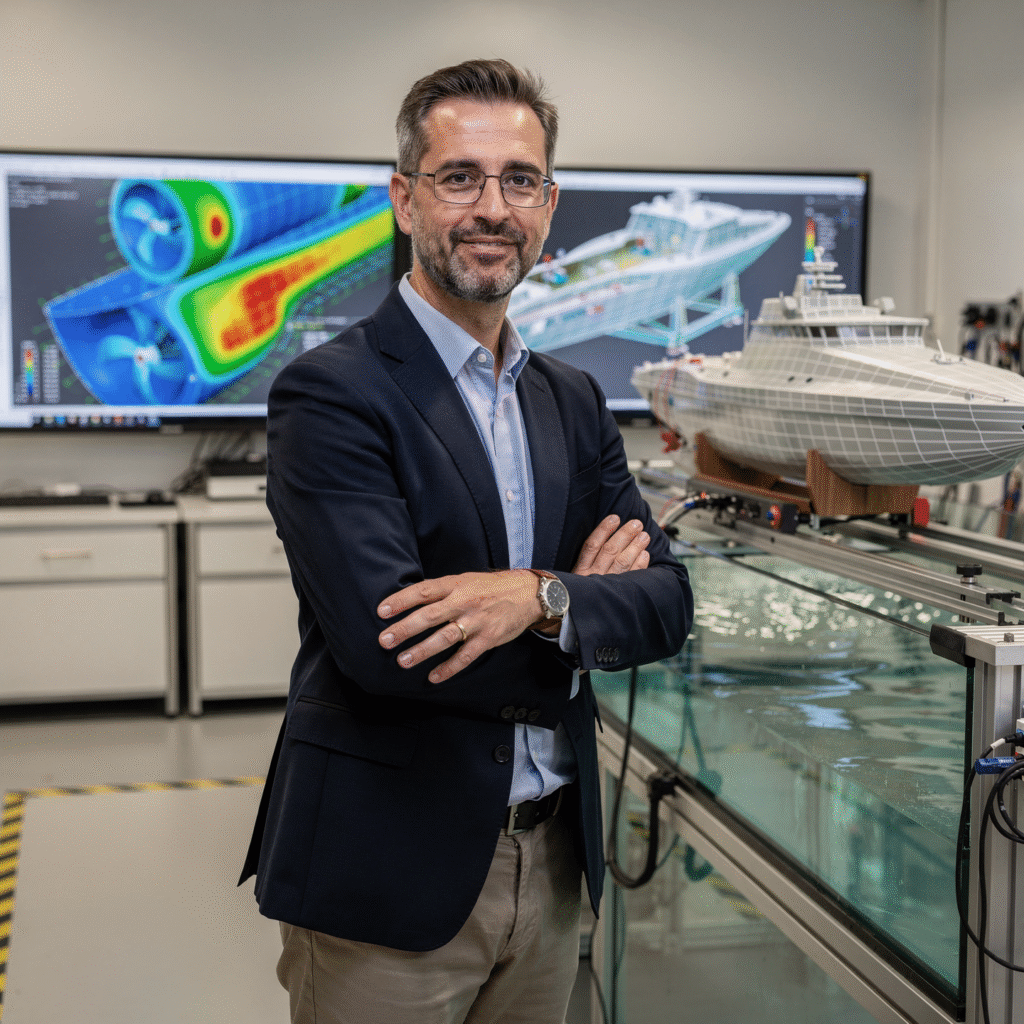
Este máster me proporcionó las herramientas y conocimientos necesarios para diseñar un sistema de control de navegación innovador para AUVs, que posteriormente implementé con éxito en mi proyecto final. Este proyecto no solo me valió la máxima calificación, sino que también atrajo el interés de una empresa líder en el sector, donde actualmente trabajo desarrollando AUVs de última generación.
Durante el máster en Ingeniería y Mecánica Naval, lideré el desarrollo de un sistema de propulsión híbrido para embarcaciones de recreo, reduciendo el consumo de combustible en un 30% según simulaciones. Este proyecto, presentado en la conferencia internacional de ingeniería naval, recibió el premio a la mejor innovación sostenible y me permitió firmar un precontrato con una importante naviera.
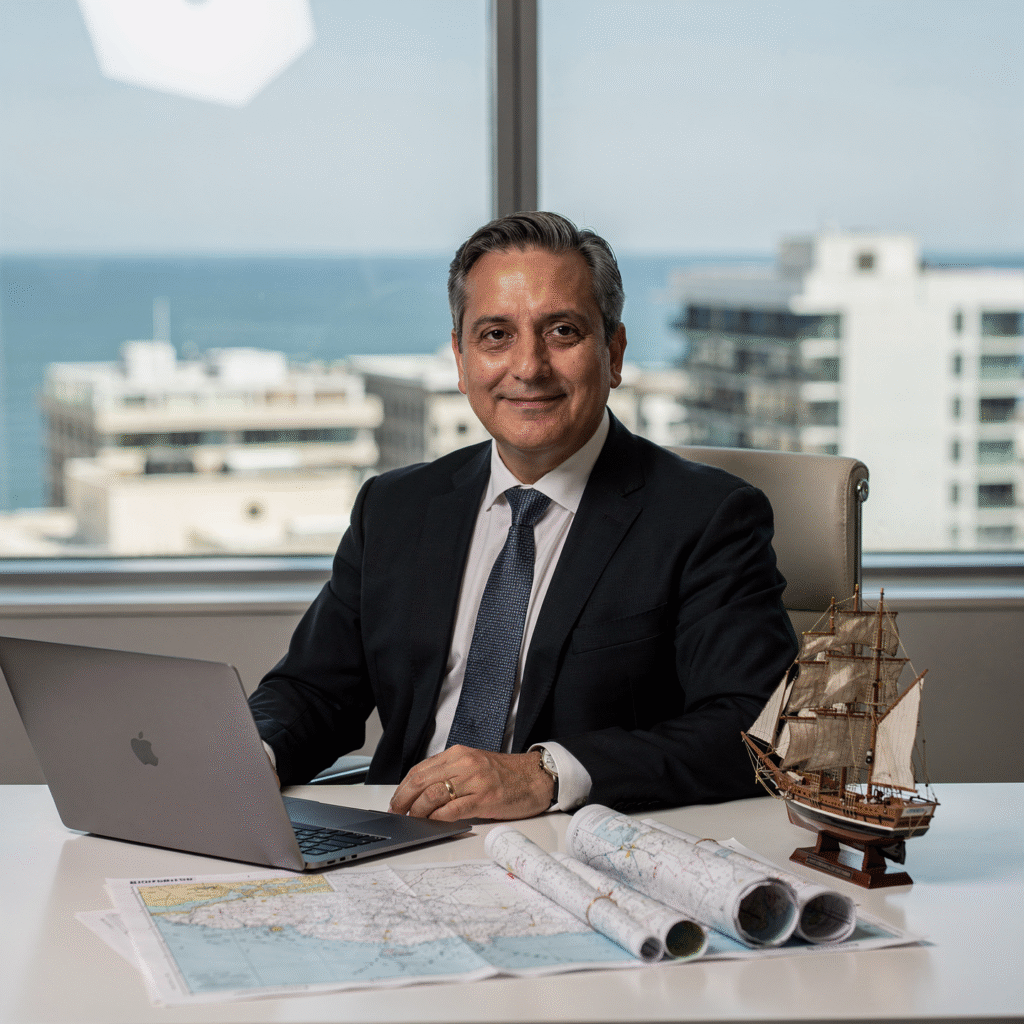
Este máster me proporcionó las herramientas y conocimientos necesarios para liderar el desarrollo de un nuevo algoritmo de navegación para AUVs en entornos con alta turbidez. Gracias a la especialización en sensores y control autónomo, logré implementar con éxito el algoritmo en un ROV de inspección de plataformas petrolíferas, aumentando la eficiencia de las inspecciones en un 30% y reduciendo significativamente los riesgos para los buzos.
Este máster me proporcionó las herramientas y conocimientos necesarios para diseñar y desarrollar un sistema de navegación autónomo para ROVs, que posteriormente implementé con éxito en una empresa líder en el sector, mejorando la eficiencia de sus operaciones de inspección submarina en un 30%.