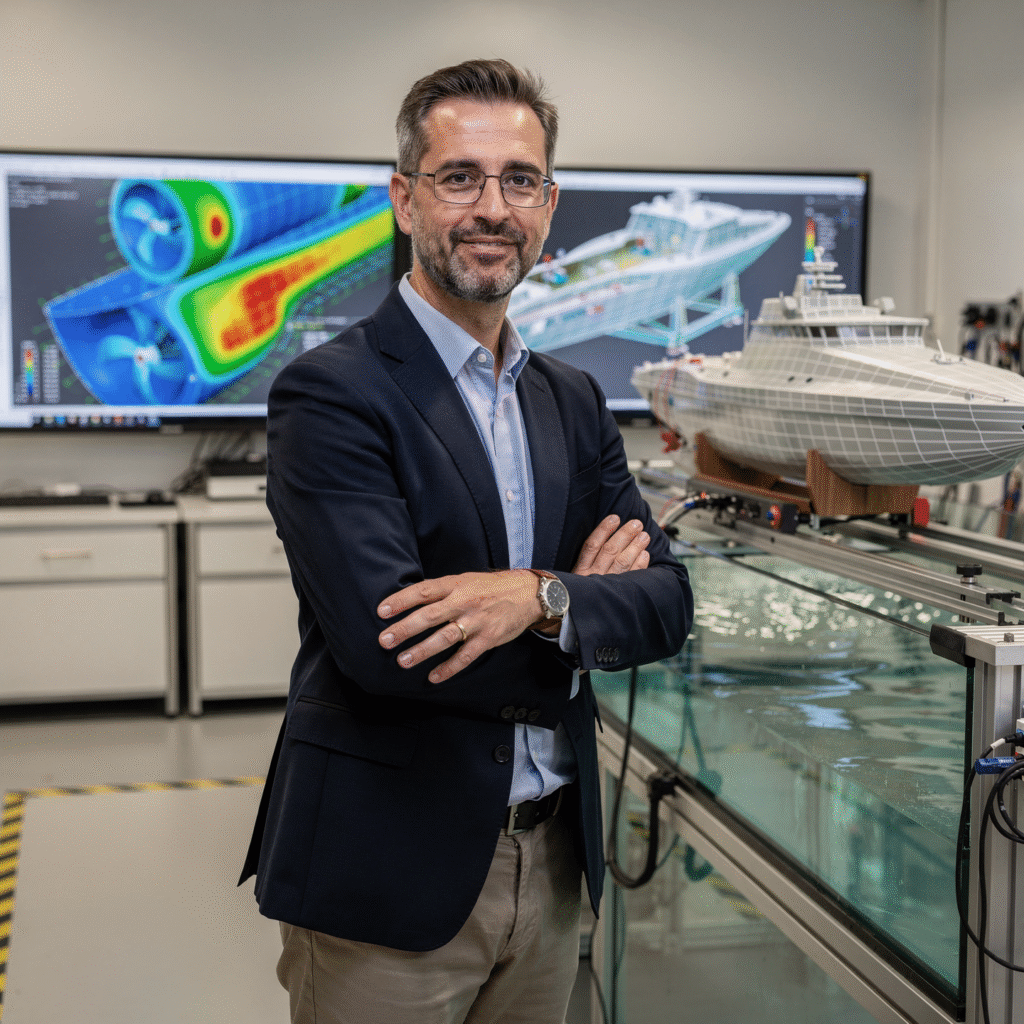
Implementar algoritmos de localización y mapeo simultáneo (SLAM):
«Adaptar algoritmos SLAM a entornos específicos, optimizando precisión y robustez ante ruido sensorial y limitaciones computacionales del sistema embarcado.»

Diseñar e integrar sistemas de navegación autónoma:
Implementar planificación de rutas dinámicas adaptadas al entorno, optimizando el consumo de combustible y minimizando riesgos mediante fusión de datos de múltiples sensores y predicción de condiciones.
Optimizar la eficiencia energética en la navegación:
Planificar la ruta optimizando la velocidad, considerando corrientes, viento y estado del mar, minimizando el consumo de combustible y emisiones.
Evaluar y mitigar riesgos en entornos de navegación complejos:
Analizar información meteorológica y oceanográfica para anticipar condiciones adversas y ajustar la planificación de la navegación, utilizando herramientas de predicción y comunicación efectiva con estaciones costeras.
Desarrollar y validar modelos predictivos para la navegación dinámica:
Integrar datos de sensores, pronósticos meteorológicos y reglas de tráfico marítimo para optimizar la ruta y anticipar situaciones de riesgo, adaptando el modelo en tiempo real a las condiciones cambiantes y validando su precisión con datos históricos y simulaciones.
Gestionar la seguridad cibernética en sistemas de navegación:
Implementar medidas de protección (firewall, antivirus, IDS) y protocolos de respuesta ante incidentes, documentando procedimientos y reportando vulnerabilidades a las autoridades competentes.

Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

Este diplomado me proporcionó las herramientas y conocimientos necesarios para desarrollar un sistema de navegación autónoma para drones de reparto. Apliqué algoritmos de planificación de rutas y evasión de obstáculos que optimizaron la eficiencia del 25% en simulaciones reales, un logro que me permitió liderar un proyecto piloto con una empresa de logística.
Este diplomado me proporcionó las herramientas y conocimientos necesarios para liderar un proyecto de optimización de rutas marítimas utilizando inteligencia artificial, resultando en una reducción del 15% en los costos de combustible y un aumento del 8% en la eficiencia operativa de la flota de mi empresa.
Este diplomado superó mis expectativas. Adquirí sólidos conocimientos en algoritmos de planificación de rutas, visión artificial y control de robots móviles, lo que me permitió desarrollar un sistema de navegación autónoma para drones que implementé con éxito en mi proyecto final, logrando una navegación precisa y eficiente en entornos complejos.
Este diplomado superó mis expectativas. Adquirí sólidos conocimientos en SLAM, planificación de rutas y algoritmos de control, que apliqué directamente en el desarrollo de un sistema de navegación autónoma para drones, logrando una precisión y eficiencia que antes me parecían inalcanzables.