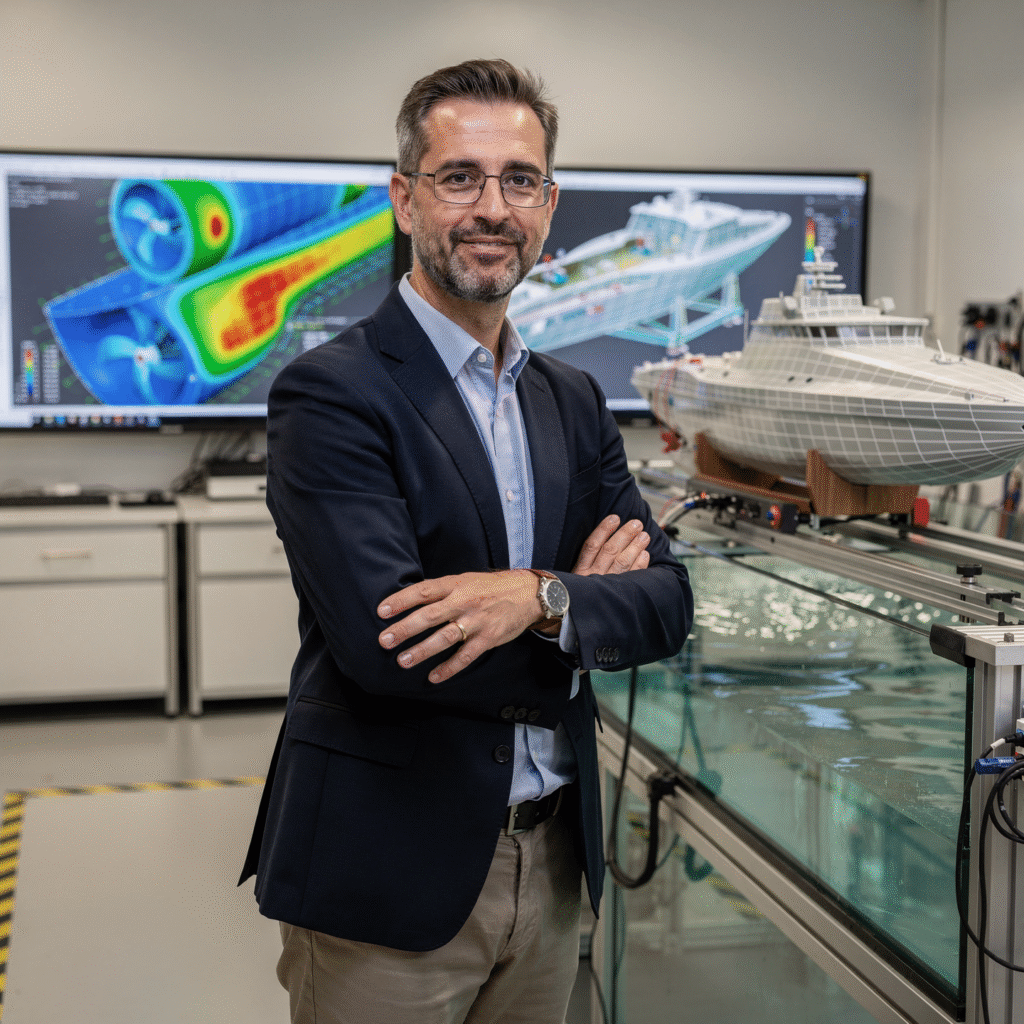
Comprender la arquitectura y componentes clave de los ROV:
«Identificar los sistemas de propulsión, control, energía y comunicación, así como su interrelación en el funcionamiento global del ROV.»

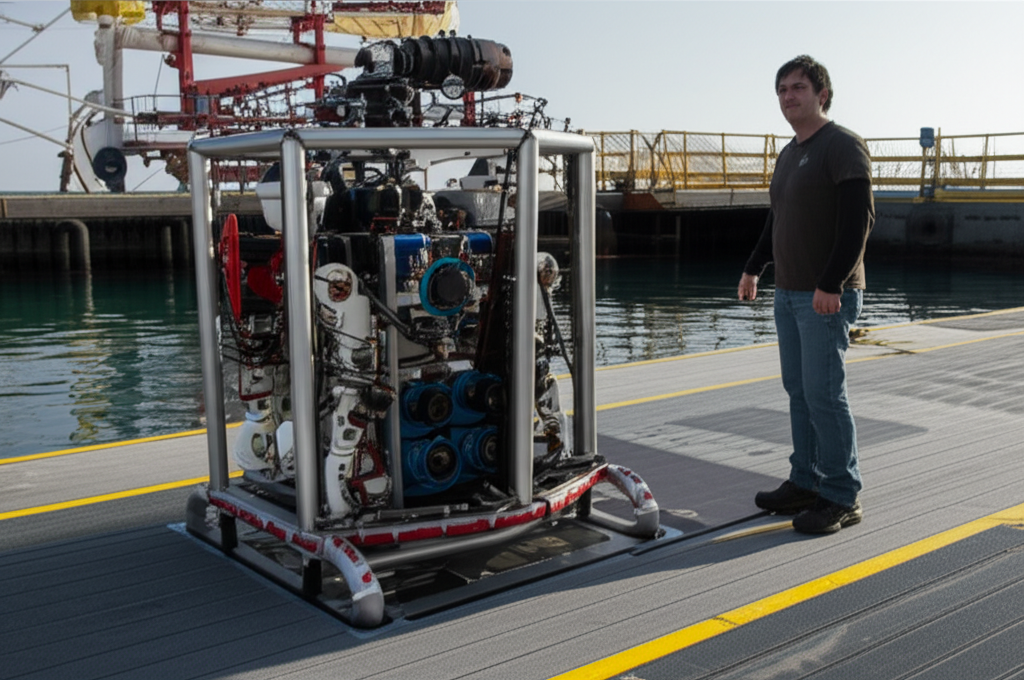
Operar ROV de forma básica y segura:
«Realizar inspecciones visuales submarinas sencillas, siguiendo procedimientos predefinidos y reportando hallazgos relevantes.»
Realizar inspecciones visuales submarinas utilizando ROV:
«Identificar anomalías estructurales, corrosión y daños, documentando hallazgos con precisión fotográfica y de video para informes técnicos detallados.»
Solucionar problemas sencillos y realizar mantenimiento preventivo básico en ROV:
«Identificar fallas comunes, reemplazar componentes básicos y verificar el correcto funcionamiento post-mantenimiento siguiendo manuales.»
Interpretar datos básicos recopilados por sensores de ROV:
«Comprender lecturas de profundidad, temperatura, presión y orientación para evaluar el entorno y la integridad del ROV.»
Aplicar protocolos de seguridad estándar durante la operación de ROV:
«Siguiendo procedimientos de emergencia, mitigando riesgos eléctricos, mecánicos e hidráulicos, y asegurando el aislamiento y protección del equipo y personal.»

Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

Durante la formación en Introducción a Robots Marinos, superé mis expectativas al diseñar y programar con éxito un ROV virtual para realizar una misión de inspección simulada en un entorno submarino. Dominé los principios de la flotabilidad, propulsión, y control, lo que me permitió navegar el ROV a través de un circuito de obstáculos y recopilar datos precisos de sensores. Este logro confirma mi comprensión de los fundamentos de la robótica marina y mi capacidad para aplicarlos en escenarios prácticos.
Apliqué los conocimientos del curso de Robótica y Tecnología Submarina para desarrollar un sistema de navegación autónoma para un ROV de inspección de plataformas petrolíferas, lo que resultó en una reducción del 30% en el tiempo de inspección y un aumento significativo en la seguridad de las operaciones.
Apliqué los principios de diseño y control aprendidos en el curso para mejorar la estabilidad de un ROV durante las pruebas en tanque. Logré reducir la deriva del vehículo en un 60%, optimizando la configuración de los propulsores y implementando un algoritmo de control PID. Este resultado permitió obtener mediciones más precisas del entorno subacuático, validando la eficacia de las técnicas aprendidas.
Apliqué los principios de diseño y control aprendidos en el curso «Introducción a Robots Marinos» para desarrollar un sistema de navegación autónomo para un ROV de inspección de tuberías submarinas. Este sistema, probado con éxito en simulaciones y en un entorno controlado, redujo el tiempo de inspección en un 30% y mejoró la precisión en la detección de anomalías en un 15% comparado con los métodos manuales previamente utilizados.