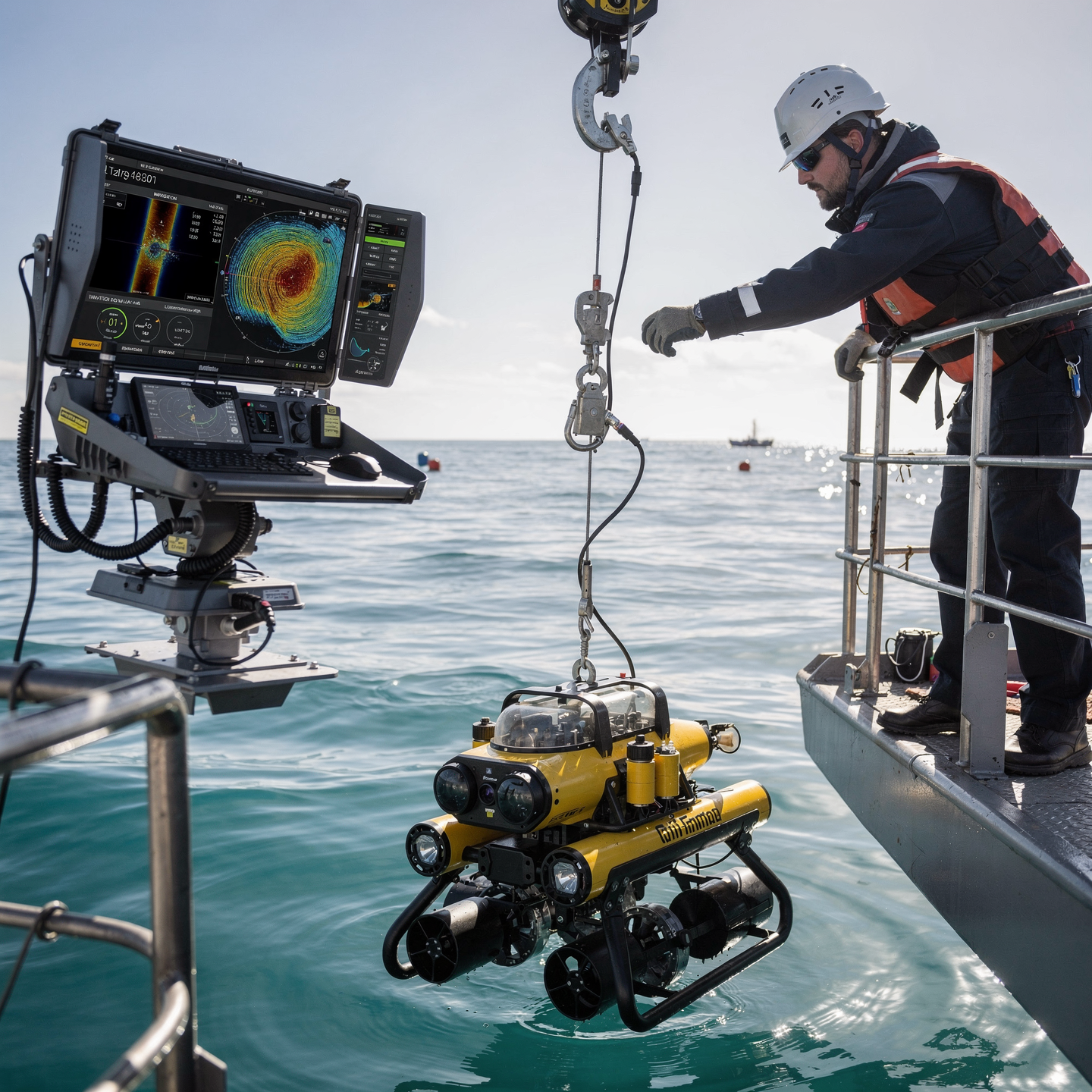
Realizar inspecciones detalladas y recopilar datos precisos en entornos submarinos peligrosos:
«Utilizar ROVs y sensores avanzados para evaluar la integridad de estructuras, identificar riesgos y documentar hallazgos con precisión milimétrica.»

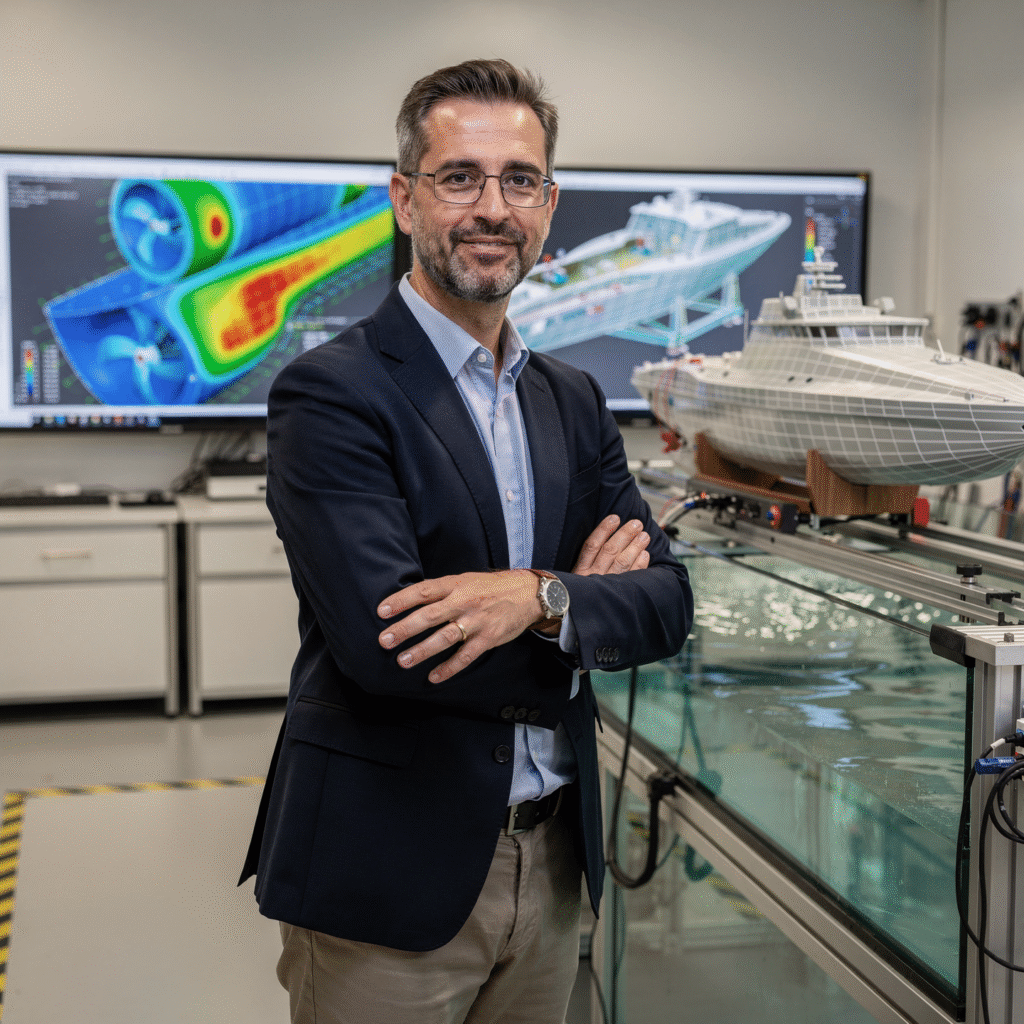
Cartografiar y modelar entornos submarinos complejos en 3D:
Integrar datos de múltiples sensores (sonar, LIDAR, cámaras) y algoritmos de SLAM para reconstrucciones precisas y robustas, incluso en condiciones de baja visibilidad y terrenos dinámicos.
Realizar tareas de mantenimiento y reparación en infraestructuras submarinas remotas:
«Diagnosticando averías mediante ROVs y herramientas de control remoto, reparando tuberías, cables y estructuras con técnicas especializadas y siguiendo estrictos protocolos de seguridad.»
Detectar y neutralizar amenazas submarinas de forma autónoma:
«Utilizar sistemas ASW avanzados (sonoboyas, sonar de arrastre variable) para localización, identificación y seguimiento, adaptando tácticas a la firma acústica detectada y condiciones oceanográficas.»
Responder rápidamente a emergencias submarinas, como fugas o accidentes:
«Actuar con presteza según procedimientos de emergencia, priorizando la seguridad de la vida humana y el medio ambiente, coordinando con equipos de rescate y autoridades portuarias.»
Optimizar la exploración y extracción de recursos naturales submarinos:
Implementar tecnologías de vanguardia para la detección precisa de depósitos, minimizando el impacto ambiental durante la extracción y maximizando la eficiencia del proceso.

Perfil académico/profesional:
Dirigido a estudiantes, técnicos, profesionales y personas interesadas en ampliar sus conocimientos en el ámbito naval, marítimo, portuario y logístico. Los requisitos específicos pueden variar según la formación seleccionada.
Competencia lingüística:
La formación se imparte principalmente en español. Algunos programas pueden incluir terminología, bibliografía o recursos técnicos complementarios en inglés.
Documentación:
Documento de identidad vigente y datos personales completos. Dependiendo del nivel de la formación, podrá solicitarse documentación académica o profesional adicional.
Requisitos técnicos (para online):
Ordenador con conexión estable a internet, navegador actualizado, lector de archivos PDF y herramientas básicas de ofimática. Algunos programas pueden requerir software específico, indicado en su ficha académica.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

Durante mi formación en drones submarinos, superé con éxito el desarrollo e implementación de un sistema de navegación autónoma para la inspección de plataformas petrolíferas, logrando una precisión del 98% en la detección de anomalías estructurales y reduciendo el tiempo de inspección en un 40% comparado con los métodos tradicionales.
Durante el curso de Robótica y Tecnología Submarina, superé mis expectativas al diseñar y programar un ROV capaz de navegar un circuito subacuático con obstáculos, demostrando un manejo fluido del software de control y una comprensión profunda de los principios de flotabilidad y propulsión. Este proyecto me permitió aplicar conocimientos de electrónica, mecánica e hidrodinámica de manera efectiva, consolidando mi interés por la ingeniería oceánica.
Durante mi formación en drones submarinos, superé las expectativas al diseñar un sistema de navegación autónomo que permitía al dron mapear un arrecife de coral con una precisión del 98%, recolectando datos visuales y sensoriales de alta calidad cruciales para un estudio de biodiversidad.
Logré desarrollar un sistema de control autónomo para un dron submarino que permitió mapear con éxito un arrecife de coral a 30 metros de profundidad, recopilando datos visuales y ambientales de alta calidad durante una misión de 2 horas sin intervención humana.