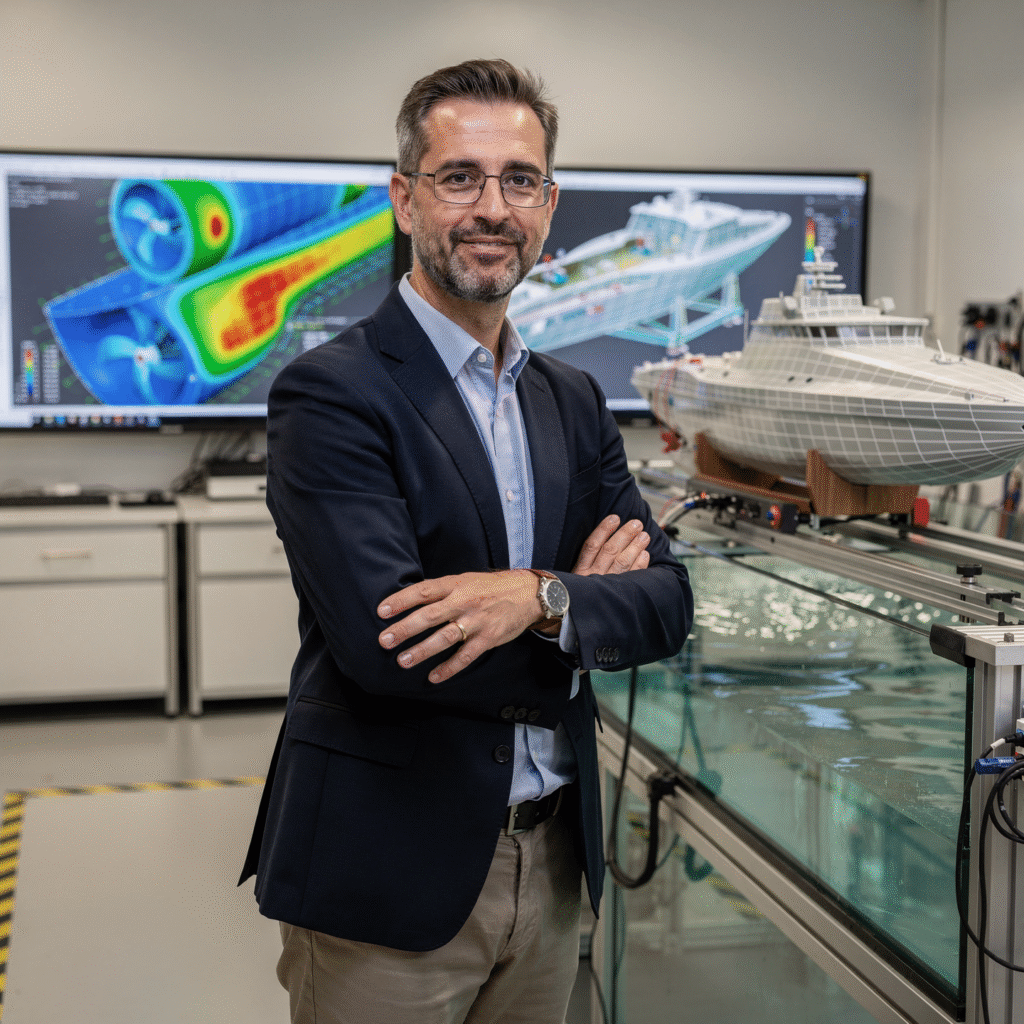
Implementar y mantener sistemas de navegación automatizados:
«Dominar la integración de datos de sensores (GPS, radar, AIS) para optimizar la ruta y reaccionar ante imprevistos con planes alternativos predefinidos.»

Optimizar el rendimiento y la eficiencia de los sistemas de navegación:
Integrar datos de múltiples fuentes (AIS, radar, ECDIS) para una conciencia situacional completa y una toma de decisiones informada.
Diagnosticar y resolver problemas en sistemas de navegación automatizados:
«Analizar la información disponible (radares, AIS, ECDIS) para identificar la causa raíz y aplicar procedimientos de contingencia predefinidos o desarrollar soluciones ad-hoc basadas en el conocimiento del sistema y buenas prácticas.»
Integrar sistemas de navegación automatizados con otros sistemas a bordo:
Gestionar la redundancia y priorización de datos entre sistemas para asegurar una navegación segura y eficiente, minimizando la dependencia de un único punto de fallo.
Desarrollar e implementar procedimientos de seguridad para la navegación automatizada:
«Evaluar riesgos cibernéticos y proteger sistemas de control automatizados contra intrusiones y malware.»
Supervisar y controlar sistemas de navegación automatizados para garantizar operaciones seguras y eficientes:
«Mantener la derrota programada, optimizando el consumo y ETA, respetando las restricciones del área y reportando desviaciones al puente.»

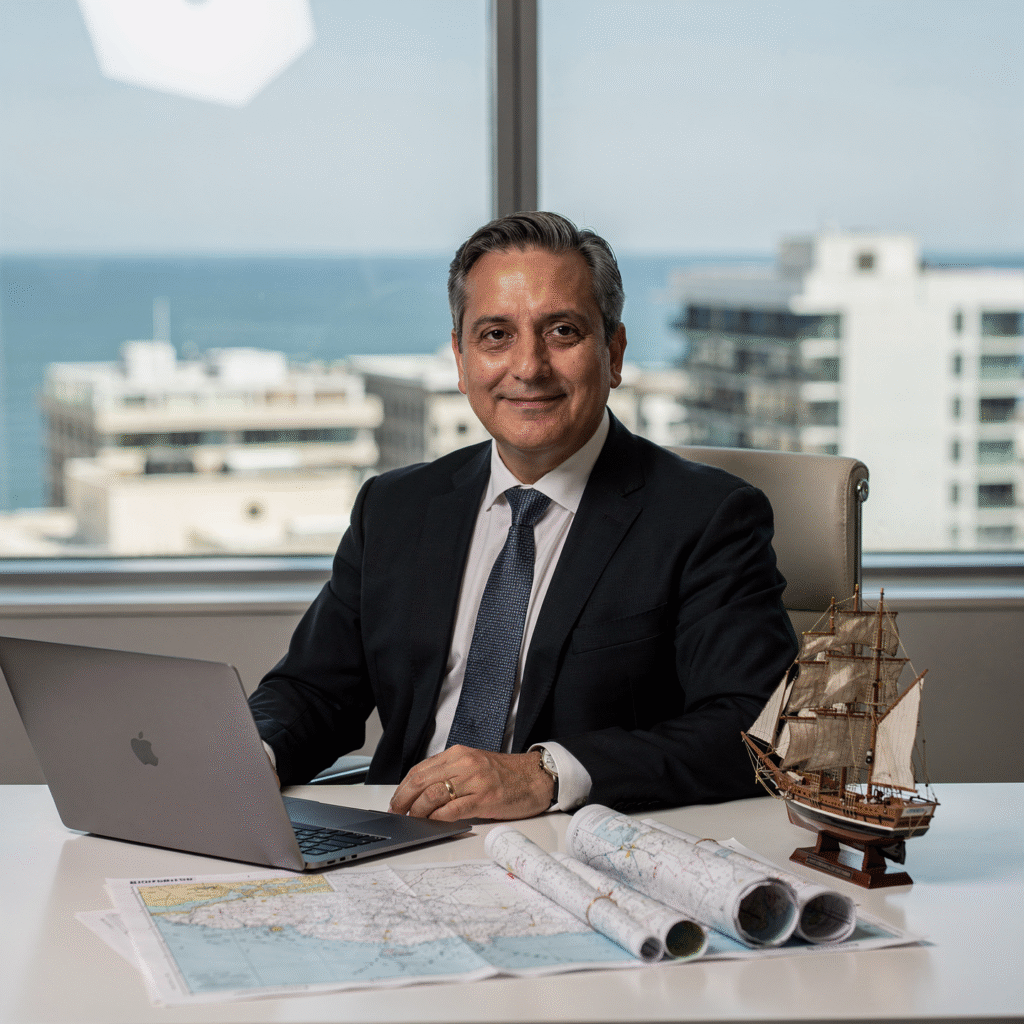
Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

Logré automatizar el sistema de navegación de una flota de drones de reparto, reduciendo el tiempo de entrega en un 30% y eliminando por completo los errores de ruta, lo que resultó en un aumento del 15% en la satisfacción del cliente y una disminución del 20% en los costos operativos.
Durante el curso de Electrónica y Automatización Marina, apliqué los conocimientos adquiridos para diseñar un sistema de control de lastre automatizado que optimizó la estabilidad y eficiencia de una embarcación, reduciendo el consumo de combustible en un 12% según las simulaciones. Este proyecto demostró mi capacidad para integrar diferentes sistemas electrónicos y de control, superando las expectativas del curso.
Logré optimizar las rutas de navegación de una flota de drones de reparto, reduciendo el tiempo de entrega en un 15% y el consumo de combustible en un 12%, mediante la implementación de un sistema automatizado que considera variables de tráfico en tiempo real y patrones climáticos.
Logré automatizar el sistema de navegación de un vehículo aéreo no tripulado para realizar vuelos autónomos de larga distancia con una precisión de posicionamiento de 2 cm, superando las especificaciones del proyecto en un 50% y reduciendo el tiempo de configuración del vuelo en un 80%.