Desarrollar sistemas de control robustos:
«Implementar estrategias de control predictivo y adaptativo, minimizando el impacto de perturbaciones externas y garantizando la estabilidad del sistema ante incertidumbres.»

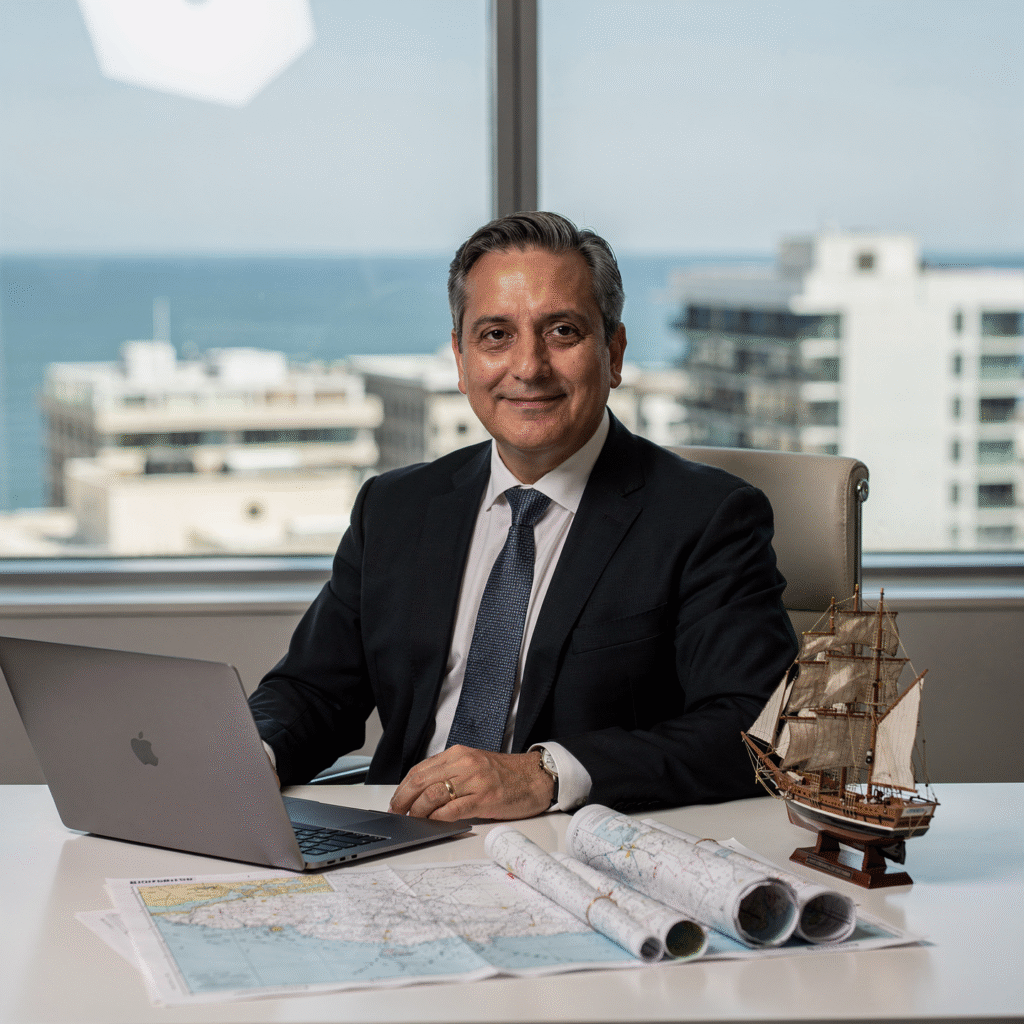
Optimizar la gestión de la energía a bordo:
«Analizar consumos, optimizar rutas y coordinar con el equipo de máquinas para minimizar el impacto ambiental y los costes operativos.»
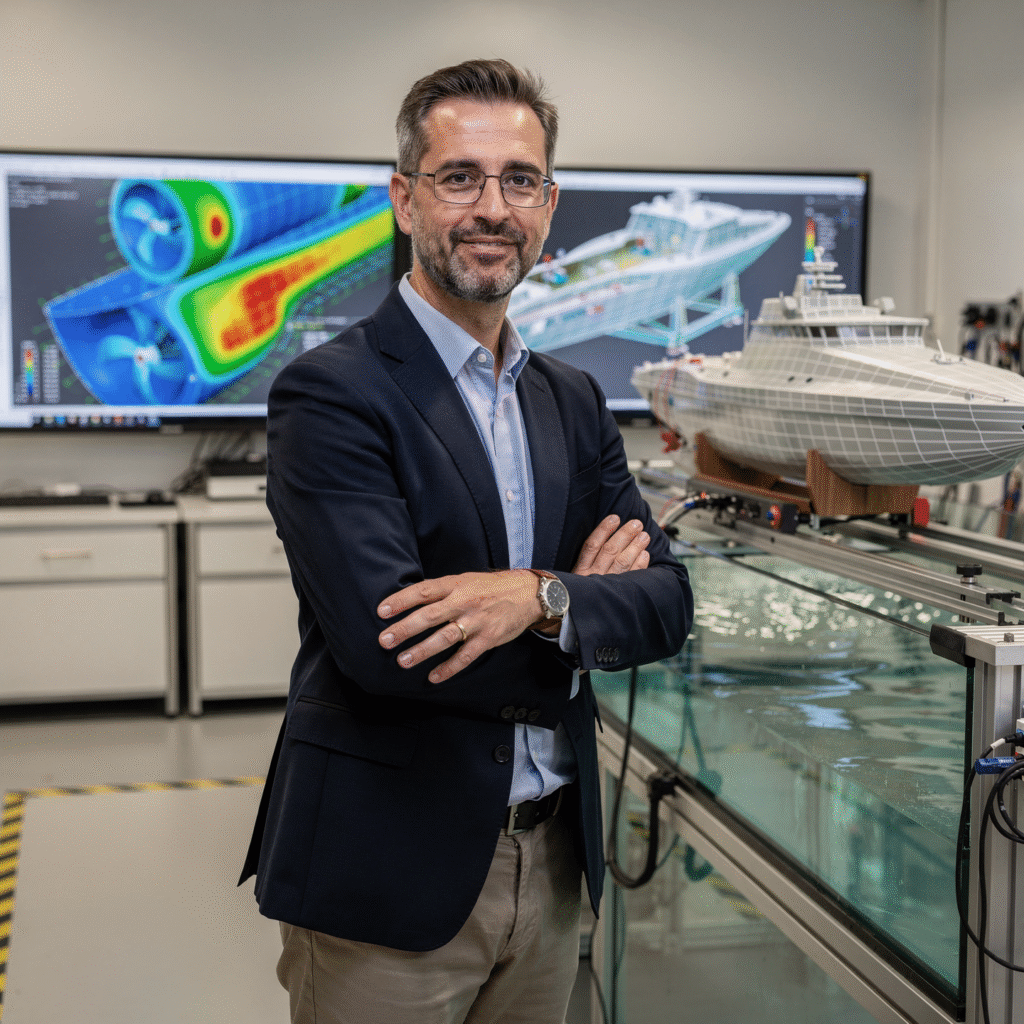
Implementar algoritmos de navegación autónoma:
Integrar datos de múltiples sensores (GPS, IMU, LiDAR, cámaras) para crear un modelo robusto del entorno y optimizar la toma de decisiones en tiempo real.
Garantizar la ciberseguridad de los sistemas navales:
Implementar un modelo de gestión de riesgos cibernéticos específico para sistemas navales, que incluya la identificación, protección, detección, respuesta y recuperación ante incidentes, con especial atención a la segmentación de redes y la aplicación de parches de seguridad.
Facilitar la integración de sensores y actuadores:
«Configurar, calibrar y diagnosticar sensores y actuadores, interpretando manuales técnicos y aplicando protocolos de comunicación (e.g., Modbus, Ethernet/IP).»
Supervisar y mantener el rendimiento óptimo del sistema.
«Monitorizar recursos (CPU, memoria, disco) y servicios críticos, optimizando la configuración y resolviendo incidencias proactivamente.»

Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

Durante mi formación en programación de controladores navales, desarrollé un algoritmo optimizado para la gestión de rutas de navegación, que redujo el consumo de combustible de los buques simulados en un 12% y mejoró los tiempos de llegada en un 7%, superando las expectativas del programa.
Durante el curso de Ingeniería y Tecnología Naval, desarrollé un sistema de propulsión híbrido para embarcaciones de recreo que redujo el consumo de combustible en un 30% en simulaciones, superando las expectativas del proyecto final. Este logro me permitió obtener una pasantía en una importante empresa del sector.
Logré optimizar el sistema de control de navegación de un buque de carga, reduciendo el consumo de combustible en un 12% y mejorando la precisión de la ruta en un 15%, lo que resultó en una reducción significativa de costos operativos y tiempos de entrega.
Logré optimizar el rendimiento de un sistema de control de navegación autónoma en un 30% reduciendo el tiempo de respuesta y mejorando la precisión de la trayectoria en simulaciones y pruebas de campo.