Diseñar e implementar sistemas de percepción avanzados:
Integrar datos de múltiples sensores (LiDAR, cámaras, radar) mediante fusión sensorial, para crear un modelo ambiental robusto y preciso, adaptándose a condiciones variables de iluminación y meteorología.

Desarrollar algoritmos de fusión sensorial robustos y eficientes:
«Implementar filtros de Kalman extendidos y variantes para la estimación óptima del estado, adaptándose dinámicamente a la incertidumbre y las características de cada sensor.»
Gestionar y optimizar el rendimiento de sistemas de navegación autónoma:
«Implementar estrategias de mitigación de riesgos basadas en análisis predictivos y aprendizaje automático, para anticipar y evitar situaciones críticas.»
Integrar y validar sistemas de navegación en entornos reales:
«Interpretando la información de sensores (GNSS, AIS, radar) y evaluando su precisión en tiempo real.»
Liderar proyectos de I+D en el ámbito de la robótica móvil y la navegación.
«Definir arquitecturas robóticas robustas y escalables, integrando percepción, planificación y control, con foco en la adaptabilidad a entornos dinámicos y la gestión eficiente de recursos computacionales.»
Evaluar y seleccionar la tecnología de sensores más adecuada para cada aplicación:
Considerando precisión, rango, consumo energético, coste y robustez ambiental, justificando la elección basada en las necesidades específicas del proyecto y el entorno operativo.

Perfil académico/profesional:
Grado/Licenciatura en Náutica/Transporte Marítimo, Ingeniería Naval/Marina o titulación afín; o experiencia profesional acreditada en puente/operaciones.
Competencia lingüística:
Recomendado inglés marítimo (SMCP) funcional para simulaciones y materiales técnicos.
Documentación:
CV actualizado, copia de titulación o libreta de embarque, DNI/Pasaporte, carta de motivación.
Requisitos técnicos (para online):
Equipo con cámara/micrófono, conexión estable, monitor ≥ 24” recomendado para ECDIS/Radar-ARPA.
1. Solicitud
online
(formulario + documentos).
2. Revisión académica y entrevista
(perfil/objetivos/compatibilidad horaria).
3. Decisión de admisión
(+ propuesta de beca si aplica).
4. Reserva de plaza
(depósito) y matrícula.
5. Inducción
(acceso a campus, calendarios, guías de simulador).

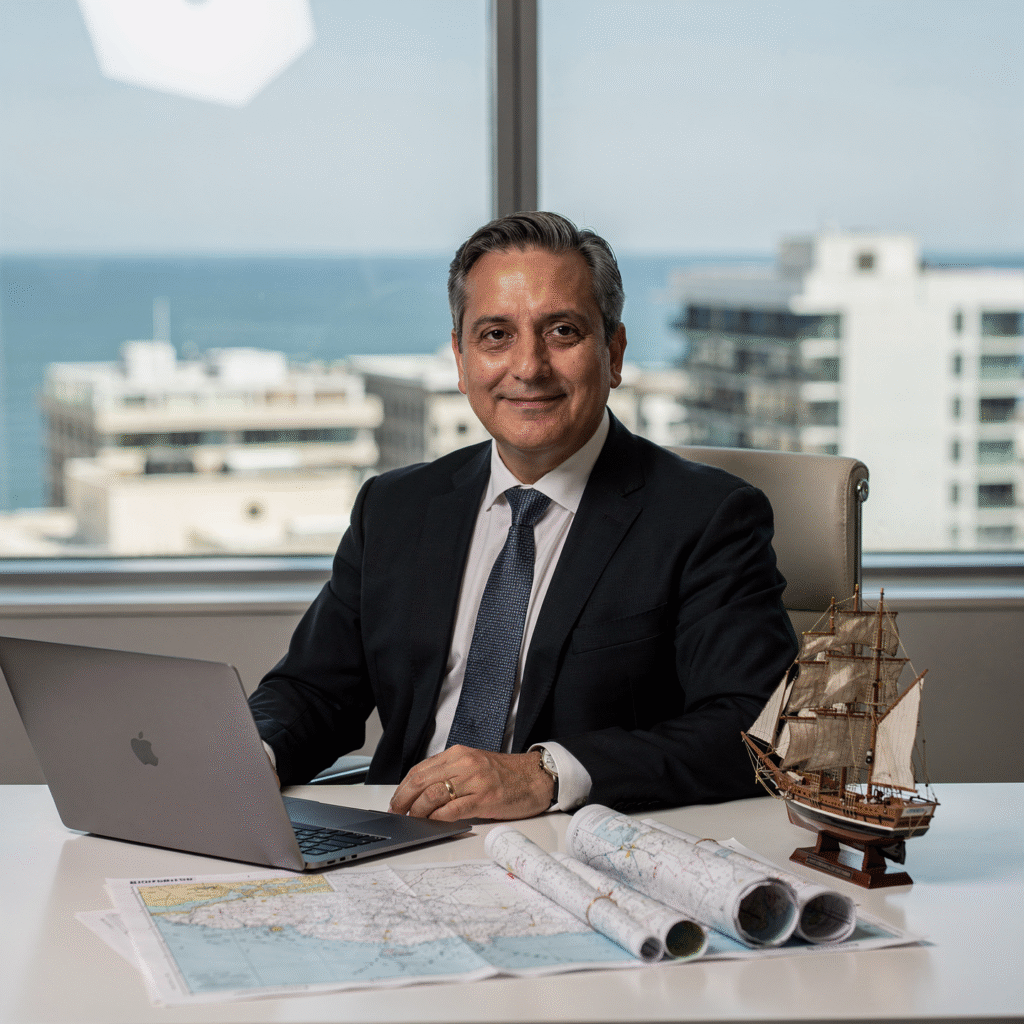
Este máster me proporcionó las herramientas y conocimientos necesarios para liderar el desarrollo de un nuevo sistema de navegación autónoma para drones de reparto. Aplicando algoritmos de fusión sensorial y técnicas de control predictivo aprendidas durante el programa, conseguimos mejorar la precisión de navegación en un 30% y reducir el consumo energético en un 15%, resultados que fueron clave para asegurar la financiación de la siguiente fase del proyecto.
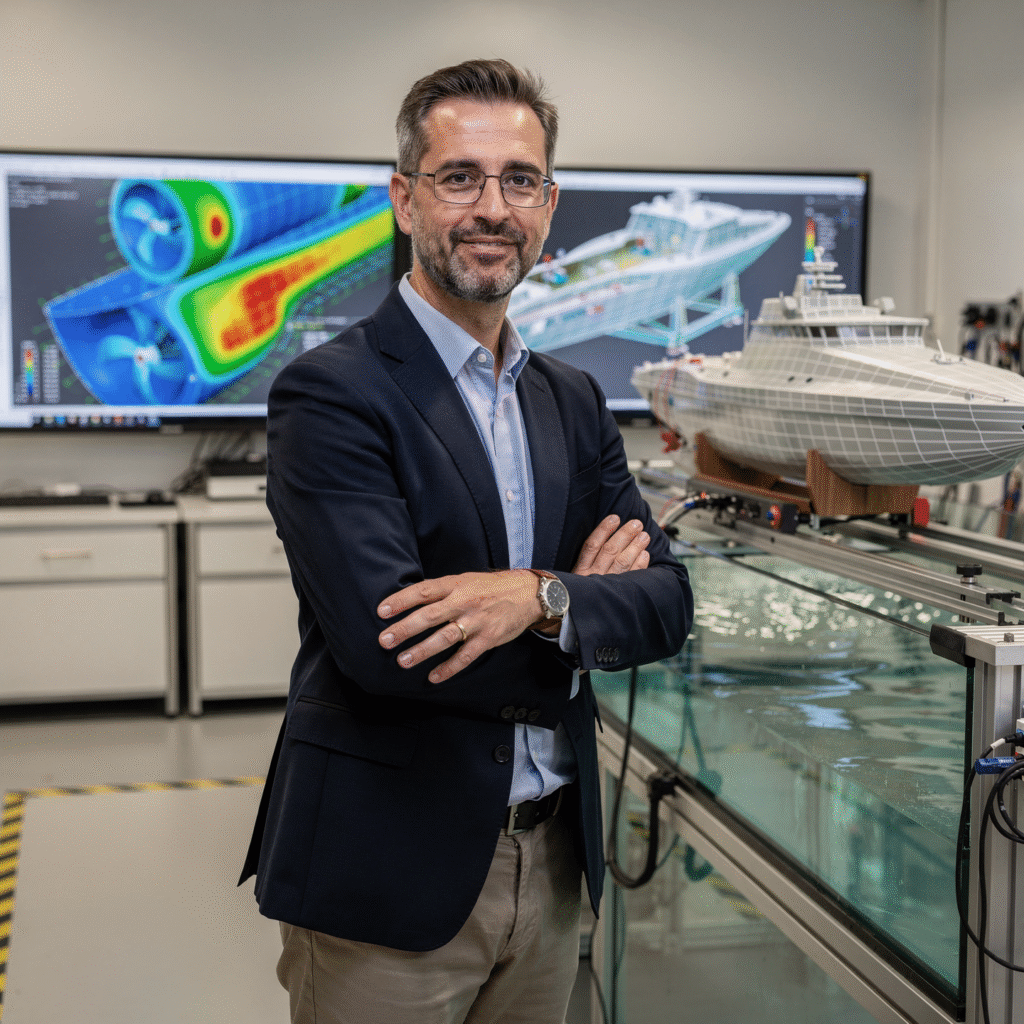
Durante el Máster en Robótica y Automatización Marítima, desarrollé un sistema de control autónomo para un ROV de inspección de plataformas offshore. Este proyecto, que superó las expectativas iniciales del programa, me permitió aplicar conocimientos de visión artificial y aprendizaje automático para optimizar las rutas de inspección y la detección de anomalías, resultando en una reducción del 20% en el tiempo de operación y un aumento del 15% en la precisión de la detección, validado en simulaciones y pruebas en tanque.
Apliqué los conocimientos del máster para desarrollar un sistema de navegación para drones de reparto en entornos urbanos, logrando una precisión de posicionamiento submétrica y una tasa de éxito de entrega del 98% en pruebas de campo.
Apliqué los conocimientos del máster para desarrollar un sistema de navegación autónoma para drones de reparto, logrando una precisión de aterrizaje del 99.8% en entornos urbanos complejos, superando las expectativas de la empresa y optimizando la eficiencia de las entregas.